产品:21
产品:21
 联系我们
联系我们

SCARA机器人外形大致如下图如示,第1、2轴结构相同,都是伺服电机加谐波减速机传动。当于,出于成本的考虑,也有将伺服电机换成步机电机,或者将谐波减速机换成行星减速机或者RV减速机的。但目前的SCARA机器人的第1、2轴还是主要以伺服电机加谐波减速机。

SCARA机器人3、4轴设计就比较丰富多样。从大类来分可以分两类:第一类为解耦式,即3轴与4轴的驱动是分离的,分花键轴、滚珠丝杆各一根,由两个电机分别驱动升降与旋转两个自由度,典型的设计为YAMAHA的SCARA设计,如下图中YAMAHA公司产品手册中介绍图片。

第二类为耦合式,即3轴与4轴的驱动的耦合的,相互影响的,由一根滚珠丝杆花键轴实现。单个电机无法实现单独的旋转或升降,必须两个电机同时驱动才能实现。
解耦式的结构优点是设计相对简单,价格对比便宜,缺点是对花键轴与滚珠丝杆的平行度要求很高,装配比较困难。而耦合式的结构优点是设计紧凑,重量较轻,缺点是滚珠丝杆花键轴价格高昂,厂家极少,基本属于垄断。
除了解耦式与耦合式的不同以外,不同厂家的SCARA对于3、4轴电机的分布,减速装置的设计有多种形式,各有优劣,这里就不一一解释。
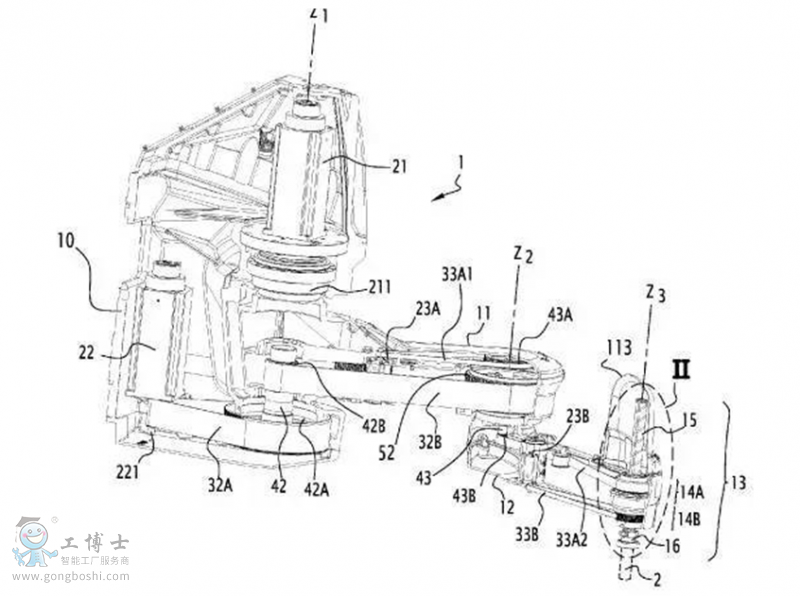
此外简单介绍一款比较特殊的SCARA机器人,由Staubli公司出品的TP80,该款SCARA机器人设计复杂巧妙,为目前世界上最快的SCARA机器人。下图为该公司公开的专利示意图。